
This section is topics related to advanced multicopter construction anddesign.
Note
- For information on understanding how a multicopter works please goHere
- For information on how to build your own simple Quadcopter using kitsor frames go Here
- For information on building or setting up a copter for first PersonView (FPV) go Here
There are several popular frame layouts for MultiCopters¶
SUNNYSKY V4008 KV380 KV600 Outrunner Brushless Motor for FPV. KDE KDE4213XF-360 Brushless Motor 4 Heavy Lift Electric Multi-Rotor sUAS Series. Tarot Brushless Disc Motor 4108 380KV 6S For RC Multicopter Drone - TL68P07. 2 Sets A1510 2200KV 2-3S Brushless Motor for RC Racing Drone Multicopter. Are you looking to put together your first quadcopter build? The Tarot 650 Sport is a great. MOTORS: $49.50. SunnySky X4108S 380 KV Brushless Multirotor Motor. ESCs: $24.99. ZTW Spider Series 30A OPTO Small ESC.
- The Tricopter uses 3 motor / propeller propulsion units with a servoto rotate one of them to compensate for adverse yaw.
- Tricopters were popular early on when the brushless motor /propeller units were new and scarce.
- They suffer from less than stellar performance and do not scalewell to larger sizes.
- But they still have some popularity for small, light hobby useapplications.
- Because this is primarily an outdated design we will not expandfurther on it in this article.
The very popular Quadcopter has 4 motor/propeller units and isavailable in any size.
A Quadcopter is an elegantly simple design and is hands down themost popular layout for a whole lot of reasons.
Quadcopters are symmetrical and embody the simplest principle ofoperation for controlling roll, pitch, yaw and motion.
Simply varying the speed of each of the motors provides full 3Dmotion and rotation and hover capability.
They are relatively inexpensive to produce and they scale well toproduction manufacturing techniques.
In various sizes and layouts they are capable of actuallyperforming useful tasks beyond simply flying around.
Their primary drawback is that a single motor failure generallyresults in an abrupt descent to the ground (crash).
A very wide variety of materials and techniques can be employed toproduce a useful Quadcopter.
There are several popular configurations for QuadCopters:
- X with and X frame arm layout and the front and back of thecopter between 2 propellers.
- and with the same kind of X frame layout as above but with thefront and back of the copter in line with one of thepropellers.
- “Dead Cat” a variation on X which in which the frame arms arefurther apart in the front and the back than they are side toside.
- Name actually comes from Bart Jansen a Dutch artist whostuffed his expired cat and made a Quadcopter out of it.
- H which has frame side arms running between the motors on eachside and connected with one or more frame arms in the middle.
- Square which has frame arms connecting between motors (andusually intermediate frame arms supporting a central frame.)
- And variations including ones with the motors laid out on acircle.
- Most of them primarily operate the same as the X frame(provides better camera exposure between motors among otherthings).
- I recommend the standard X frame design because it is strongand simple and it’s natural symmetry balances flying forcesbetter.
A humming bird sized Estes Proto Xis shown below.
A fifteen thousand dollar SteadyDrone Q4D-X Quadcopter with 28”propellers, 8KG lifting capability and claimed 60 minute flighttimes.
For professional use, HexaCopters and OctoCopters with 6 and 8Motor/propeller propulsion units are popular.
- Hexacopters, Octocopters, Hex Y’s and Octo X’s can provide stableheavy lift platforms good for photography and other uses.
- Hex and Octocopters may have the benefit of potentially being ableto continue to fly with a single motor failure.
- However the increased complexity versus a Quadcopter makes themmore failure prone.
- The reduction in prop size and increase in prop speed result in asmoother flight than an equivalent large blade Quadcopter.
- However it also results in some reduction in flight efficiency andendurance all other things being equal.
Hex Y6 and Octo X8 designs with pairs of coaxial motor/propellerunits mounted back to back are also becoming popular.
Singlecopters and Coax copters are very new designs and have someadvantages in specific applications.
- Since they tend to a single ducted body for either the one or twomotor/propeller units they tend to be self protected indoors.
- The coax copter which relies on variable thrust on each of it’s 2props for rotation is functionally simpler than the single copter.
- The side profile of the ducted body makes these copters moresusceptible to winds outdoors requiring more effort to compensate.
- While generally good at hovering and fine positioning, they aremore speed and performance limited than other multicopter designs.
- The Singlecopter in particular is reasonably adaptable to gasolineengines for much greater endurance.
- The possibility of using a single large propeller implies thatgood efficiencies could be realized even with an electricversions.
- The Singlecopter features a single motor/propeller unit with 4servo controlled vanes to direct roll, pitch and yaw.
- The Coaxcopter has dual motor/propeller units for thrust and yawcontrol and 2 servo controlled vanes for roll and pitch.
- There are also variable pitch Multicopters for incredible acrobaticperformance.
- Variable pitch multicopters have some interesting potential uses as well like theCurtis Youngblood Stingray 500 shown below.
- Servo control of the props (rotors) produces roll, pitch and yawso they are often powered by a single motor with shaft or beltdrive.
- If you use a single motor it is feasible to use a gasoline enginegiving you the potential for considerable endurance and range.
- These are very high performance and can even fly inverted, theyare also mechanically more complex but can be built robustly.
- And copters with more than 8 motor/propeller units may be useful forspecialized, extreme (orinsane) applications.
Motors, propellers and ESCs¶
For multicopters, motors, propellers and ESCs (speed controllers) arecritical and have been failure prone in the past.
This ECalc based Xcopter: motor - propeller - battery - ESC calculator willhelp you pick the best components for your copter.
- Quadcopter design will be used for illustration as they are the mostwide spread and the most versatile.
- But the information applies equally to Hex and Octo designs,either conventional or coaxial Y and X types.
- The brushless out-runner motors have to support the full weight ofthe copter continuously while turning at high speed.
- Hobby grade motors have often used inadequate Conrad type unsealedbearings which are good axially but not in thrust.
- And the motors are usually open frame to permit the greatestcooling but providing little or no protection
- This has meant an unnecessarily high failure rate and very poorsurvival in wet or dusty conditions.
- The cheapest possible Chinese motor is never a good choice forsomething that literally hangs in the air by it’s motor.
- Some of the best motors have 2 or better 3 easily replaceableABEC-7 bearings, RCTiger-Motor Pro series and KDE for instance.
- The best motors are well ventilated, made with high temperaturecomponents and coated and sealed for environmental protection.
- The best motors like TMotor and KDE have performance comparisoncharts, these should be reviewed when designing a copter
- You are best off selecting motor - prop - battery cellcombinations that will provide 10% or higher G/W efficiency at50% throttle.
- You should also target you copter design weight so that ithovers at approximately 50% throttle for optimum efficiency andflight time.
- Top motors can cost considerably more, but reliability,performance and efficiency can be much better and worth it inthe long run.
- Low KV motors running on lower voltage (fewer cells) with largepropellers are the most efficient and provide the longestflight times.
- Selecting the best motor, propeller, battery set will enable youto build a copter with a usable 30 minute flight time including acamera.
- You can get 30 minutes from 330 copters with 8” props to 700size copters with 18” props depending on camera / gimbalweight.
- It is very hard to get much more than 30 minutes of usableflight time from any “useful” multicopter regardless of size.
- For hobby grade components, 20 minute maximum flight timeswould be a more realistic goal.
- Hobby grade motors have often used inadequate Conrad type unsealedbearings which are good axially but not in thrust.
- ESCs are also very important.
- High quality ESCs are more reliable than cheap ones.
- And ESCs need to be properly sized to ensure they can provide themaximum current that is necessary.
- Generally use the right size not over sized because they aremore efficient if operated in the appropriate range (andlighter).
- Sufficient cooling is also very important especially for “HeavyLift” copters, and the ESCs may need to be placed in the airstream.
- For small to medium QuadCopters there are four in one ESCs in the20 - 30 Amp size range with several advantages.
- They eliminate the need for a power distribution plate or blockand all the attendant wiring.
- The considerable reduction in DC wiring results in less DC EMFradiation interference with the compass.
- They can often be conveniently installed tidily in the centerof the copter frame.
- The 20 and 25 amp ones work with 3 or 4 cell LiPo batteries andthe 30 amp one works with 3 to 6 cell batteries.
- They have a built in aluminum heat sink plate on one side(which you can augment with a finned heat sink if necessary).
- You can use a thin layer of Fujik silicone thermal glue toattach a finned heat sink if one is needed.
- They generally have higher reliability than individual ESCs andare reasonably priced.
- Larger diameter slower turning propellers are normally a lot moreefficient than smaller, faster ones.
- But there are limits and drawbacks:
- Trying to turn too large a prop for a given motor can cause itto overheat so motors usually have a maximum prop size.
- Also, really large, slow props can reduce the responsiveness ofthe multicopter and even cause it to oscillate in the air orvibrate.
- Unless taken to extremes these difficulties are not usuallysignificant and can be compensated for by various means.
- And you can always drop the diameter an inch if the handlingcharacteristics or motor stress are not what you want.
- There are also different designs of propellers and for larger onesturning at slower speeds design is especially critical.
- Carbon fiber designs with cupped blades that are wider at thehub and narrower at the tip are best for larger sizes 14” andover.
- Smaller ones in the 14” and under category can be of moreconventional design with a wider than normal blade and ofplastic or CF.
- Often motors are “charted” with specific propellers and theseare certainly the best starting point for optimum performance.
- TMotor is considered a premium prop, but good results have beenobtained with RC-Timer and Tarot in the large tapered props.
- APC, DJI, GemFan, RC Drones and Graupner all produce good propsin the 14” and under category.
- But there are limits and drawbacks:
Professional Grade Power System for large Quadcopters (28” Propellers)¶
- The Tigermotor U8 Pro Seriesmotor is currently top of the line for a commerciallyavailable (large) copter motor.
- It features Environmentally protected, closed construction and
- easily replaceable bearings.
- They have very high quality two piece 27, 28 and 29” carbon fiberpropellers for them as well
- And a top quality 70 AMP ESC (speed controller) to go with it.
- U8 Pro T-Motor $300.00, 28” CF Props $370.00 a pair, 70 Amp Pro ESC$110.00 @ four each = $2380.00.
- These are used in the large Steadidrone Quadcopter shown above,clearly a top quality professional and expensive product.
- This is a very heavy lift and long endurance copter and is completelyexcessive and hazardous for most uses and needs.
- This combination will work well for a Quadcopter with a total weightof up to 24 pounds and can achieve 40 minute flight times.
- This is a copter designed for very serious uses that demand it’sheavy lift and long endurance capabilities and is not for amateurs.
- Disaster relief, search and rescue, fire spotting, surveillance,ecological and geographical survey and mapping are appropriate uses.
Professional Grade Power System for Medium Quadcopters (16” Propellers)¶
- Clearly, applying similar quality to a more reasonably sized (andcost) copter is normally going to be a lot more practical.
- A 380KV T-Motor 4008is $85.00, 16x5 CF Prop $90.00 a pair and 30 Amp Pro ESC $50.00 @four each = $720.00.
- This setup will work well for a copter up to 10 pounds or so andprovide exceptional durability, efficiency and endurance.
- This is a very practical setup for a professional Quadcopter forphoto or video use with full sized cameras and a brushless gimbal.
- It can be set up to let you choose 4S 14.8 volt, 5S 18.8 volt or6S 22.2 volt batteries and 14” to 17” props according to yourtotal weight.
- With a proper setup you could reasonably expect to achievepractical 30 minute plus flight times with full camera equipment.
- This is a very superior ($120.00) KDE 4014XF-380KV Motor with 3 largereplaceable ABEC bearings rated at about 200 hours.
- This motor is capable of using 13” to 18” propellers and operating very efficiently with a wide range of batteries from 3 cell to 6 cell.
- This KDE Motor has a phenomenal range of operation and can be used on a 7 pound to a 20 pound Quadcopter.
- Every component and manufacturing technique was clearly optimized to produce the best possible motor without compromise.
- This motor has a finned heat-sink case and a self ventilated design with high temperature encapsulated components.
- In fact it is designed to run, if necessary, continuously at temperatures that would instantly destroy most other motors.
- It is reasonable to expect that various configurations could provide well over an hour of useful operating time with cameras.
- It is feasible to produce a QuadCopter that will approach the performance of the $15,000.00 Steadidrone at a fraction of the cost.
- A similar practical lifting capability and nearly 40 minute useful flight times should be achievable even with 18” Propellers.
- And given the extreme over design and ruggedness of the motors, similar reliability and longevity could also be expected.
- This is the motor I will be using in my next Quadcopter and I will allow for up to 18” propellers.
A Hyper Efficient Medium Small Professional Grade Motor For Long Endurance¶
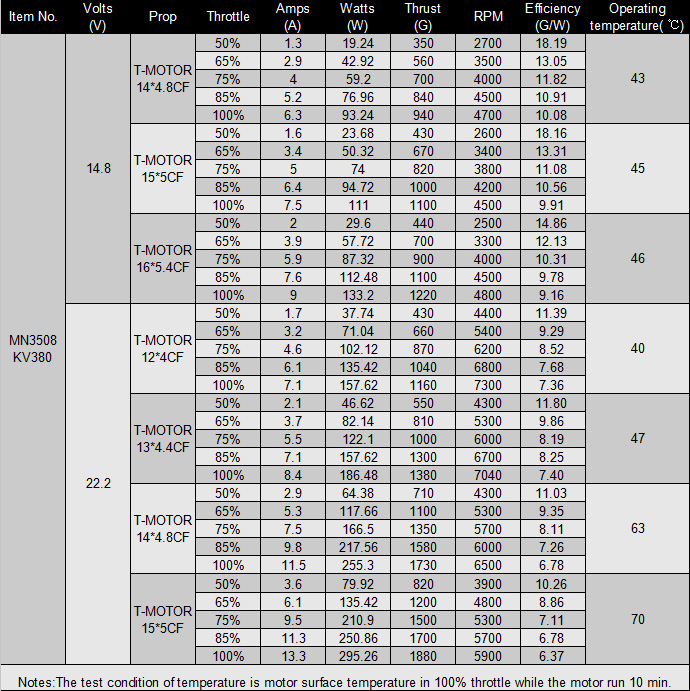
- The $70.00 T-Motor MN3508 380KV Navigator series motoris ideal for long flight time applications.
- This is the only motor in this size that can get G/W efficienciesover 17 at 50 percent throttle.
- If you want to build a 4-8 pound copter for maximum endurance this is the motor to use with a 4 cell LiPo.
- Because of it’s extremely high efficiency in it’s hover range it is also a candidate for high efficiency lithium batteries.
- Panasonic or LG’s high power Lithium batteries have about twice the energy density of the LiPos we normally use.
- But maximum discharge is only 2C so low current draw is required, the high efficiency of these motors can provide that.
- Carbon fiber 14” to 16” propellers will be required.
Professional Grade Power System for Small Quadcopters (10” - 14” Propellers)¶
- The largest market segment is for Quadcopters in frame sizes that use10 to 14 inch propellers and weigh 3 to 7 pounds.
- The 650 KV T-Motor MT3506at $65.00 is a high quality small but powerful pancake that can turn props from 11” to 14” diameter.
- With a 3 cell LiPo battery and T-Motor 14” prop at $73.00 a pair it can lift up to 7 pounds and achieve very good endurance.
- Add 4 T-Motor 18 Amp ESCs at $27.00 @ four each = $514.00 for top quality motors, props and ESCs.
- This small pancake motor can achieve good efficiency with 3S 11.1 volt or 4S 14.8 volt LiPo batteries and an appropriate sized prop.
- The frame should be sized to accept up to 14” propellers and various battery configurations.
- It should be configurable to achieve 20+ minute flight times with a GoPro size camera and brushless gimbal plus FPV or telemetry.
- This would still be a very capable and rugged Quadcopter capableof professional results and reliability.
- The above Motor / Propeller / ESC setups are all as close toprofessional quality as we can currently make them.
Consumer Grade Power System for Medium Quadcopters (15” - 16” Propellers)¶
- It is also possible to build a reasonably reliable and efficientQuadcopter using less expensive components.
- The $45.00 SunnySky 390KV X4112Smotor or the really low cost $18.00 RCTimer 5010-14 360KV motors.
- Which will work well with an easy to install and low EMF $40.00Hobbywing four in one ESC.
- And they both work well with RCTimer 15x5.5” (4 for $28.00) or16x5.5” (4 for $35.00) CF propellers.
- The Sunnysky Combo will cost about $260.00 and work very efficiently for copters up to about ten pounds.
- The RCTimer Combo will cost about $150.00 and will provide extended flight time for copters up to about 6 pounds.
- These motors will both actually support up to 17” propellers and work with 3 to 6 cell LiPo batteries.
- You could still design a copter that would get 30 minute flight times while carrying a GoPro and gimbal if desired.
- The frame for either of these motors should be designed to support at least 16” prop diameter and 17” would be better.
- These will not last as long nor be as reliable as the previous T-Motor configurations but will still deliver lots of solid use.
Consumer Grade Power System for Small Quadcopters (8” - 12” Propellers)¶
Mario party 8 wii iso torrent download free. Here is a durable and low cost alternative for powering smaller hobbyor even semi-pro sub 5 pound Quadcopters.
The DJI 2212 Motorsprovided with their low cost ARF Flamewheel Quadcopters are unusually durable and cost $24.00 each.
And DJI’s specially hubbed 10” plastic props at $8.00 a pair are well balanced, efficient and rugged.
And this easy to use $40.00 four in one ESC eliminates a powerdistribution board, reduces EMF and provides good reliability.
For $150.00 you can actually get quite a useful and durable powersystem for a smaller sub five pound quadcopter.
The $40.00 SunnySky X4108S pancake motor is also capable of being used on Quadcopters lifting up to 10 pounds.
- It is well regarded, efficient and durable and is suitable for use with 14” or 15” propellers and 4 cell to 6 cell LiPo batteries.
- Clearly these are not the only alternatives.
- If you want to use your copter for constant, professional use you will want something like the first 3 configurations.
- For occasional, hobby or non-critical use for flying, FPV and / or personal video or photography the others should be OK.
- The KDE and Pro T-Motors bearings will last longer and are more weather proof and reliable than the less expensive alternatives.
- And the more expensive Carbon Fiber props are more efficient, better balanced and more durable than cheaper alternatives.
- But properly installed on an appropriate copter the less expensive alternatives listed can provide many reliable hours of flying.
- I have favored slow speed pancake motors because efficiency and flight time benefit from the larger propellers they can use.
- The above illustrates just some of the possibilities in identifying an appropriate power system for your project.
The MultiCopter Frame¶
There are many types of frames and it is most important to put together a frame that is appropriate for your use.
- There are a lot of Multicopter frame types and many are available as bare frame kits or Almost Ready To Fly or Ready To Fly copters.
- Most professional grade Multicopters are made from fiberglass and carbon fiber cut tubing and plate.
- Carbon fiber is very strong, but is also brittle and canshatter on impact, it is also hard to machine and to glue to.
- Fiberglass weighs a bit more for equivalent strength but ismore shatter resistant and easier to machine and glue to.
- Fiberglass or carbon fiber tube and sheet construction are verysuitable to use for making your own copters.
- Many consumer grade Multicopters are made with injection moldedplastic parts and aluminum tubing.
- Some injection molded parts can be very durable (the Iris’sZytel frame arms for instance), but others are cheap and breakeasily.
- Square aluminum tubing frame arms are common, but they tend tobend or break with annoying frequency in normal mishaps.
- Except in specialized welded H or box frames aluminum tubingframe arms are sub optimal and will not be covered in depthhere.
- Some of the newer, smaller, commercially made Quadcopters havemonolithic injection molded plastic shells.
- On smaller copters these shells can be quite durable but theywould be too fragile on larger ones even if mold costs werejustified.
- A few Quadcopters have monolithic shells made from vacuum formedlaminated Kydex or other plastic sheet
- Vacuum formed shells of laminated Kydex have proven verydurable on small copters and are very good for waterproof uses.
- At least one vacuum formed copter has been made with built inblade guards the Safe Flight 4410 (unfortunately out ofbusiness).
- Hand laid fiberglass or carbon fiber is also popular on high endquadcopters.
- There are some very attractive, hard to get and not inexpensivehand laid fiberglass and carbon fiber shells made by “DeX”.
- There are also a variety of fiberglass shells for civilian,commercial and military use including an amphibious one.
- Fiberglass shells tend to be expensive and may get damaged inuse and can be difficult to repair.
- Each type of construction has advantages and disadvantages and itis very important to figure out what is important for your needs.
- Prop to prop and prop to frame clearance limit the max diameter ofyour propeller blades.
- Allowing for various prop diameters will let you tune thecopter for its current weight, batteries and function.
- Generally allow an additional half inch of clearance from proptip to tip or to center frame to avoid asymmetrical prop washvibration.
- A major design criteria is to size the frame appropriately forthe largest propellers you might ever want to use.
- Generally bigger propeller diameter equals better efficiencyand an X frame layout normally permits the largest possibleprops.
- Of course the motor speed and power and frame strength have tobe matched to the propeller diameter and to total liftingcapacity.
- Pancake Low KV, Low RPM motors can turn bigger propellersefficiently.
- It is possible to overlap prop tips if you have one above theother, but it does affect efficiency and induces asymmetricvibration.
- Big slow props can have adverse vibration, instability, gustcompensation and response rate issues also so that is adownside.
- The additional motors of Hex and Octocopters can permit singlemotor out recovery and provide for smoother flight for photo uses.
- But they need to use smaller propellers because of motor tomotor clearance which is less efficient resulting in shorterflight times.
- There is also additional cost and weight of the frames andextra motors and propellers.
- And, the overall increase in complexity also reducesreliability.
- High quality extended service larger pancake motors and propsare just starting to become available.
- So we are likely to see a shift to large Quadcopters fromHexacopters and Octocopters even for professional andcommercial uses.
- Most professional grade Multicopters are made from fiberglass and carbon fiber cut tubing and plate.
The Carbon Fiber or Fiberglass Tube and Plate Frame¶
The carbon fiber or fiberglass tube and plate frame is popular becauseit is strong and light and easily manufactured.
- The Tarot 650is a typical layout medium sized carbon fiber Quadcopter frame thatcan work with up to 17” propellers.
- It features folding arms and landing gear.
- It’s ability to support pancake motors and 17” props means it canprovide long flight times.
- Some people have said the quality of construction is not as goodas it could be but for $125.00 it is an amazing bargain.
- Fabrication requirements and techniques for fiberglass and carbonfiber tube and plate copters.
- On the copters shown above the method of attachment is by clampingcarbon fiber tube frame arms with aluminum brackets.
- This is because of the difficulties in attaching carbon fiberparts as well as the stress that can result from drilling thetubing.
- Fiberglass is not quite as strong or light as carbon fiber but itis more flexible and easier to join and machine.
- If what you need is available in a commercial frame kit you arenormally better off buying it as you will spend more making your own.
- It will also take a lot of time and effort to design the copter,to obtain the components and to, cut, drill, machine and fabricatethem.
- There is also a strong possibility that design and fabricationmistakes and misperceptions will require that some things getredone.
- If you have sufficient reason to make your own frame, tube and plateconstruction is generally the most practical for home production.
- It is reasonable to mix materials, commonly carbon fiber frame tubesand fiberglass central and motor mounting plates.
- Carbon fiber and fiberglass tubing and plate can be cut with ahacksaw or power jig or band saw (with metal or fiberglassblades).
- It can also be drilled and milled with HSS or TC coated drillsand mills, but all tooling wears out very quickly cutting thesematerials.
- Carbon fiber in particular is tricky to cut, drill and machine, itcan tear, shatter or de-laminate if not done smoothly and slowly.
- A drill press is mandatory for carbon fiber, you cant centerpunch a pilot drill hole, so it needs to be held precisely inplace.
- Avoid milling of carbon fiber if at all possible, it is verydifficult to accomplish satisfactory results.
- You will see carbon fiber plates that have milled slots onconsumer copters but these have generally been cut with a waterjet.
- With carbon fiber you will generally get better resultsdrilling precision placed holes rather than attempting to millslots in it.
- You can carefully and slowly cut a carbon fiber plates exterioredges with a power saw and smooth them with a Dremel tool.
- If you must put in slots consider drilling a hole at each endand using a small circular saw on a Dremel or flex shaft toconnect them.
- Carbon fiber and fiberglass tubing and plate can be cut with ahacksaw or power jig or band saw (with metal or fiberglassblades).
- It will be necessary to provide appropriate brackets to clampthe motor mounts and central hub to the frame arm tubes.
- Tubing needs to be clamped but must not be “crushed”, silicone orrubber gasket can provide protection and vibration isolation.
- Hardware should be aluminum or stainless steel machine screws andyou can use Nylok nuts or “Blue” Loctite on regular nuts.
- Plate separation and mounting can be provided with Nylon oraluminum standoffs.
- (Note: It would be really nice if somebody made an X internalslip-glue fit ferrule for the center of the frame tubes but theydon’t - yet!)
- There are a wide variety of Carbon fiber and epoxy fiberglasscomponents to choose from.
- Carbon fiber products are available from RockWest Composites and Carbon Fiber Tube Shopand Dragon Plate
- A really good article on cutting and gluing carbon fiber productsfrom Carbon Fiber Tube Shop
- Fiberglass and Carbon Fiber products are available from: CST Sales and ACP Sales
- A datasheet for 3M 2216 Epoxy Glueand a source for itAmazon
- A datasheet for Loctite 9430 Glue and a source for Loctite9340 Amazon
Using manufactured Plastic and Fiberglass Components in Your Own Frames.¶
- Although often not reasonable to make yourself some parts can be usedeffectively in your own designs.
- There are retrofit kits like the Team Blacksheep FPV subframe for aDJI Flamewheel quadcopter that reuse it’s plastic frame arms.
- And there are many cases where components from various frames can beused to good effect in our own designs.
- Clearly it is necessary to research your individual design to assurethat the component pieces are actually available from thedistributors.
- Research can provide an excellent source of very desirablecomponents:
- Or the $14.00 CNC milled ultra tough fiberglass frame arms used in theHoverthings Quadcopters:
- DJI injection molded frame arms from their Flamewheel copters areused in the TBS Discovery FPV frame.
- Clearly using manufactured parts will require research as tosuitability and size for your project as well as actual availability.
- But if you can accommodate them they can make your projectsimpler and better.
Homemade waterproof frame using a hinged electrical box¶
An absolutely excellent, very clean, rugged and waterproof design usingcarbon fiber arms and plastic electrical and plumbing parts.
- Here is a link to Alec Short’s construction article in Makezine
- I really like the use of the central 4 way hub for stabilizing thetubes and the slip fit adjustable tension T’s for motor mounts arealso great.
- The mounting of n Pixhawk or APM2.x would really require the separateGPS / compass module in order to work correctly.
- There are a wide variety of latch type weatherproof electrical boxeswhich could be used for this.
- The main requirement is to get CF tube with an outer diameterappropriate to the plumbing / electrical fittings you want to use.
- I’ll definitely be visiting the electrical and plumbing section thenext time I’m in Home Depot.
Vacuum Formed Frames and Components.¶
- Although this is specialized and requires a vacuum forming “press” itmay be justified for some applications.
- A vacuum molding press can be made relatively inexpensively thatcan make whole small shell type frames or for components.
- Copters made this way can be made weather tight and even waterproof and they can be incredibly tough.
- Kydex is a laminated plastic sheet that produces a quite strongmonocoque shell when molded properly.
- The no longer in production Safe Flight Copters SFC4410-1 vacuumformed propeller protected H Quad Frame.
- And the inexpensive ($120.00) and extra tough, water proofAquacopter frame
- A fully functional vacuum forming system can actually be constructedwith a shop vacuum and an electric grill.
- Vacuum forming can also be used to make central shells for copterswith tube, plastic or fiber glass frame arms.
- This may be over specialized for most uses, but if you want to maketough, light central frame shells or covers.
- Or, if you want to build multiple small to medium Quadcopters thatare tough and waterproof this could be just the ticket.
- (Or you could just buy an Aquacopter frame!!!)
Specific Building Examples and Techinques¶
- Some design considerations for a medium large, high efficiency, heavylift Quadcopter build.
- A simple, rugged and very versatile X Quadcopter with a framesized large enough to accept 18” diameter propellers mightinclude:
- High quality 20mm carbon fiber tube frame arms with SteadiDronemotor mounts and central frame tube clamps from EBay or China.
- Cut and drilled carbon fiber or fiberglass top and bottom centralframe plates mounted to the tube clamps and standoffs.
- A custom or commercial off the shelf landing gear system.
- An optimal Pro configuration might include the top rated$120.00 KDE 4014XF-380KF motors and a 30 amp 3 - 6 cell four inone ESC.
- The motors and ESC would cost about $540.00 and you would get acopter tuneable to lift up to 20+ pounds in total weight.
- It is reasonable to get this configuration to achieve usable 60minute flight times even with photo or video equipment aboard.
- A more conservative hobby configuration might include the $40.00SunnySky X4108S 380KV motors and a 25 amp four in one ESC.
- The motors and ESC would cost about $200.00 and you would get acopter tuneable to lift up to 10+ pounds in total weight.
- Even with this setup you could achieve usable flight times inexcess of 30 minutes with small to medium consumer sizecameras.
- Some additional features that need to be considered are:
- A third frame plate under the two frame tube sandwiching platescan accommodate the batteries, ESCs and Receiver.
- A vacuum formed, fabricated or adapted top and bottom shell canweatherproof the copter and increase its resistance to mishaps.
- This frame is less than 27” from corner to corner, but props canbe removed for transport or folding arms could be incorporated.
- This frame will be very light and strong and it will allow lots oflatitude in how it is set up and it will be easy to upgrade.
- It’s ability to accept larger props even with an inexpensive powersystem will provide much better than average flight times.
- The copters capabilities will be according to the power systemselected, the battery combination used and the total weight.
- You can include a camera gimbal under the center plate, make surethe landing gear does not interfere with the cameras view.
- The landing gear should minimize interference with prop wash andprovide strong, resilient and stable support.
- If you really are determined to build your own frame, this is areally good place to start.
- The above design is a very capable pro-grade Quadcopter with anexceptionally wide performance and endurance envelope.
A Small Quadcopter Optimised to Use High Efficiency Lithium Batteries¶
- Modern ultra efficient Lithium batteries can have nearly twice theenergy per unit weight of the LiPo batteries we normally use.
- 3300 mah 3.7volt Panasonic NCR18650B batteries weigh 47 grams versusa normal LiPo equivalent of about 100 grams per cell.
- Their disadvantage is that their maximum discharge rate is only 2C so6.6 Amps.
- They will also last for many times the number of charge dischargecycles of our normal LiPos.
- Used properly a copter using these batteries can get nearly twice theflight time of one with the same weight of LiPo batteries.
- The most important factor in designing a copter to use thesebatteries is to keep the weight low enough that their is sufficientcurrent.
- This quadcopter design uses carefully selected T-Motor MT2206 1200 KV30 gram motors and 10” props with a light carbon fiber frame.
- It includes a 2S 2P 6600mah lithium battery, autopilot,receiver and even an FPV camera and transmitter.
- It weighs about a pound and since the battery is 2 parallel it canprovide 13.2 amps of current (max current is less than 10 amps.)
- Xcalc computationsshow that a hover time of 60 minutes might be possible with arealistic fly around time of about 30 minutes.
This is an easy to build example of a practical and rugged design withexceptional capabilities and double the normal flight time.
Links To Specific MultiCopter Builds¶
- Here is a link to Forrest Franz’s build of a very simple, very lightweight, very strong carbon fiber Quadcopter frame
And some links to some of Forrests extremely ambitious copterbuilding techniques and concepts.
And here is a link to Luke Cook’s very serious, very well thought outand meticulously executed OctoCopter Build
A link to Stuart Dodin’s really nice X8 heavy lifter Octocopter
A Commercial MultiCopter Exhibiting Advanced Design Concepts¶
Here is an example of an excellent QuadCopter design: the AeryonSkyRanger for high end UAV applications.
This copter has a lot of things right and is really a study in gooddesign and quality construction.
- The rotating ball full enclosure camera Gimbal provides good weatherprotection and improved performance.
- The motors are on the bottom under the arms.
- More aerodynamically efficient with no prop wash interference andvery little intake interference.
- Noticeably increased flight times, greater lift capability andquieter as well.
- High torque, low KV “pancake” style motors and slow turning, largediameter, high efficiency props.
- This is much more efficient than faster motors with smallerdiameter conventional design props.
- This also increases flight times and load capacity and reduces thesound footprint.
- Tapered carbon fiber frame arms are more aerodynamically efficientand are light and very strong.
- The fully enclosed weather tight framework with snap latch typeaccess makes maintaining the copter easy.
- A simple spring loaded landing gear provides for uneven landing sitesand minimal interference with the prop wash.
This QuadCopter incorporates several excellent design concepts and showswhat can be done without budget constraints.
The Skyranger has features we can use in our own designs but it isimportant to understand all designs are compromises.
The 3DRobotics Iris is one of the best designed QuadCopters that you canactually get and it is a real bargain.
Conclusion and Additional Design Considerations¶
- I have not covered either 3D printing or CNC machining.
- These are both perfectly valid techniques for either whole framesor for parts or accessories.
- But most people do not have the equipment or capability which iswhy they are not covered here.
- Clearly if you have either of these capabilities they can greatlyenhance your copter projects.
- I have also not covered in depth hand laid fiberglass or carbon fiberor vacuum bagging.
- You can make Dynamite frames or shells this way but this toorequires serious individual skill and capability (especiallycarbon fiber).
- I have also not gone into detail about the engineering criteria formulticopters:
- I don’t know.
- From what I’ve seen very few people do.
- C. One who does is Paul Pounds PHD and here is his Paper on thesubject: Quadrotors
- If you stick to a simple design and try to keep frame arm to a simplesingle small tube under the prop wash it will work fine.
- Round tubing has about half the flat plate area (prop washinterference) as the same sized square tubing.
- You can improve efficiency by putting the motor prop under theframe arm but then there are frame design and clearance issues.
- Try to keep the weight centralized as much as possible and keep theautopilot near the horizontal center if possible.
- So that the copter tends to roll and pitch as though pivotingaround the center of mass and around the autopilot.
- However it is not as critical as some people have made it out tobe because the stabilizing throttles will automaticallycompensate.
- You can do a lot with a rudimentary understanding of the forcesinvolved, if you need more it is a career, not a hobby.
KV (rpm/v): 380
Weight: 113g
Diameter: 46mm
Length: 25.5mm (excluding motor shaft)
Wire length: 60cm
Prop adaptor output shaft diameter: 6mm

Application: specially designed for quadcopter and multi-rotor aircrafts.
Prop size (inch) | Throttle | Pull(g) | Power(W) | Temperature under 100% throttle for 10 minutes(℃) |
APC14*4.7 | 50% | 340 | 19.24 | 50 |
2.9 | 3163 | 12.81454 | ||
5 | 3747 | 10.54054 | ||
6.7 | 4070 | 9.479629 | ||
8.7 | 4385 | 8.62069 | ||
50% | 340 | 19.24 | 56 | |
2.7 | 3245 | 13.76376 | ||
4.5 | 3872 | 11.56156 | ||
6.2 | 4250 | 10.46207 | ||
7.6 | 4587 | 9.868421 | ||
18.5 | 2.1 | 3076 | 13.64221 | |
65% | 760 | 68.45 | ||
75% | 1140 | 135.05 | ||
85% | 1320 | 170.2 | ||
100% | 1580 | 227.55 | ||
DJI15x5 | 1.8 | 3038 | 15.31532 | |
65% | 710 | 57.35 | ||
75% | 1020 | 103.6 | ||
85% | 1280 | 151.7 | ||
100% | 1560 | 194.25 | ||
APC12*3.8 | 50% | 480 | 37.74 | 60 |
3.6 | 4675 | 9.634635 | ||
6.4 | 5487 | 7.882883 | ||
9.2 | 6000 | 6.903643 | ||
11.8 | 6387 | 6.18415 | ||
50% | 380 | 31.08 | 49 | |
2.4 | 4903 | 10.88589 | ||
4.5 | 6070 | 9.109109 | ||
5.7 | 6583 | 8.613877 | ||
7.5 | 7210 | 7.927928 | ||
50% | 730 | 68.82 | 94 (Do not suggest run for long time.) | |
5.5 | 4281 | 8.681409 | ||
9.2 | 4950 | 6.952605 | ||
12.2 | 5269 | 6.166002 | ||
15.5 | 5610 | 5.492589 | ||
50% | 700 | 55.5 | 63 | |
4.2 | 4276 | 10.51051 | ||
7.2 | 5085 | 8.633634 | ||
10.3 | 5610 | 7.30342 | ||
13.7 | 6115 | 6.575919 |
- Author: admin
- Category: Category
This section is topics related to advanced multicopter construction anddesign.
Note
- For information on understanding how a multicopter works please goHere
- For information on how to build your own simple Quadcopter using kitsor frames go Here
- For information on building or setting up a copter for first PersonView (FPV) go Here
There are several popular frame layouts for MultiCopters¶
SUNNYSKY V4008 KV380 KV600 Outrunner Brushless Motor for FPV. KDE KDE4213XF-360 Brushless Motor 4 Heavy Lift Electric Multi-Rotor sUAS Series. Tarot Brushless Disc Motor 4108 380KV 6S For RC Multicopter Drone - TL68P07. 2 Sets A1510 2200KV 2-3S Brushless Motor for RC Racing Drone Multicopter. Are you looking to put together your first quadcopter build? The Tarot 650 Sport is a great. MOTORS: $49.50. SunnySky X4108S 380 KV Brushless Multirotor Motor. ESCs: $24.99. ZTW Spider Series 30A OPTO Small ESC.
- The Tricopter uses 3 motor / propeller propulsion units with a servoto rotate one of them to compensate for adverse yaw.
- Tricopters were popular early on when the brushless motor /propeller units were new and scarce.
- They suffer from less than stellar performance and do not scalewell to larger sizes.
- But they still have some popularity for small, light hobby useapplications.
- Because this is primarily an outdated design we will not expandfurther on it in this article.
The very popular Quadcopter has 4 motor/propeller units and isavailable in any size.
A Quadcopter is an elegantly simple design and is hands down themost popular layout for a whole lot of reasons.
Quadcopters are symmetrical and embody the simplest principle ofoperation for controlling roll, pitch, yaw and motion.
Simply varying the speed of each of the motors provides full 3Dmotion and rotation and hover capability.
They are relatively inexpensive to produce and they scale well toproduction manufacturing techniques.
In various sizes and layouts they are capable of actuallyperforming useful tasks beyond simply flying around.
Their primary drawback is that a single motor failure generallyresults in an abrupt descent to the ground (crash).
A very wide variety of materials and techniques can be employed toproduce a useful Quadcopter.
There are several popular configurations for QuadCopters:
- X with and X frame arm layout and the front and back of thecopter between 2 propellers.
- and with the same kind of X frame layout as above but with thefront and back of the copter in line with one of thepropellers.
- “Dead Cat” a variation on X which in which the frame arms arefurther apart in the front and the back than they are side toside.
- Name actually comes from Bart Jansen a Dutch artist whostuffed his expired cat and made a Quadcopter out of it.
- H which has frame side arms running between the motors on eachside and connected with one or more frame arms in the middle.
- Square which has frame arms connecting between motors (andusually intermediate frame arms supporting a central frame.)
- And variations including ones with the motors laid out on acircle.
- Most of them primarily operate the same as the X frame(provides better camera exposure between motors among otherthings).
- I recommend the standard X frame design because it is strongand simple and it’s natural symmetry balances flying forcesbetter.
A humming bird sized Estes Proto Xis shown below.
A fifteen thousand dollar SteadyDrone Q4D-X Quadcopter with 28”propellers, 8KG lifting capability and claimed 60 minute flighttimes.
For professional use, HexaCopters and OctoCopters with 6 and 8Motor/propeller propulsion units are popular.
- Hexacopters, Octocopters, Hex Y’s and Octo X’s can provide stableheavy lift platforms good for photography and other uses.
- Hex and Octocopters may have the benefit of potentially being ableto continue to fly with a single motor failure.
- However the increased complexity versus a Quadcopter makes themmore failure prone.
- The reduction in prop size and increase in prop speed result in asmoother flight than an equivalent large blade Quadcopter.
- However it also results in some reduction in flight efficiency andendurance all other things being equal.
Hex Y6 and Octo X8 designs with pairs of coaxial motor/propellerunits mounted back to back are also becoming popular.
Singlecopters and Coax copters are very new designs and have someadvantages in specific applications.
- Since they tend to a single ducted body for either the one or twomotor/propeller units they tend to be self protected indoors.
- The coax copter which relies on variable thrust on each of it’s 2props for rotation is functionally simpler than the single copter.
- The side profile of the ducted body makes these copters moresusceptible to winds outdoors requiring more effort to compensate.
- While generally good at hovering and fine positioning, they aremore speed and performance limited than other multicopter designs.
- The Singlecopter in particular is reasonably adaptable to gasolineengines for much greater endurance.
- The possibility of using a single large propeller implies thatgood efficiencies could be realized even with an electricversions.
- The Singlecopter features a single motor/propeller unit with 4servo controlled vanes to direct roll, pitch and yaw.
- The Coaxcopter has dual motor/propeller units for thrust and yawcontrol and 2 servo controlled vanes for roll and pitch.
- There are also variable pitch Multicopters for incredible acrobaticperformance.
- Variable pitch multicopters have some interesting potential uses as well like theCurtis Youngblood Stingray 500 shown below.
- Servo control of the props (rotors) produces roll, pitch and yawso they are often powered by a single motor with shaft or beltdrive.
- If you use a single motor it is feasible to use a gasoline enginegiving you the potential for considerable endurance and range.
- These are very high performance and can even fly inverted, theyare also mechanically more complex but can be built robustly.
- And copters with more than 8 motor/propeller units may be useful forspecialized, extreme (orinsane) applications.
Motors, propellers and ESCs¶
For multicopters, motors, propellers and ESCs (speed controllers) arecritical and have been failure prone in the past.
This ECalc based Xcopter: motor - propeller - battery - ESC calculator willhelp you pick the best components for your copter.
- Quadcopter design will be used for illustration as they are the mostwide spread and the most versatile.
- But the information applies equally to Hex and Octo designs,either conventional or coaxial Y and X types.
- The brushless out-runner motors have to support the full weight ofthe copter continuously while turning at high speed.
- Hobby grade motors have often used inadequate Conrad type unsealedbearings which are good axially but not in thrust.
- And the motors are usually open frame to permit the greatestcooling but providing little or no protection
- This has meant an unnecessarily high failure rate and very poorsurvival in wet or dusty conditions.
- The cheapest possible Chinese motor is never a good choice forsomething that literally hangs in the air by it’s motor.
- Some of the best motors have 2 or better 3 easily replaceableABEC-7 bearings, RCTiger-Motor Pro series and KDE for instance.
- The best motors are well ventilated, made with high temperaturecomponents and coated and sealed for environmental protection.
- The best motors like TMotor and KDE have performance comparisoncharts, these should be reviewed when designing a copter
- You are best off selecting motor - prop - battery cellcombinations that will provide 10% or higher G/W efficiency at50% throttle.
- You should also target you copter design weight so that ithovers at approximately 50% throttle for optimum efficiency andflight time.
- Top motors can cost considerably more, but reliability,performance and efficiency can be much better and worth it inthe long run.
- Low KV motors running on lower voltage (fewer cells) with largepropellers are the most efficient and provide the longestflight times.
- Selecting the best motor, propeller, battery set will enable youto build a copter with a usable 30 minute flight time including acamera.
- You can get 30 minutes from 330 copters with 8” props to 700size copters with 18” props depending on camera / gimbalweight.
- It is very hard to get much more than 30 minutes of usableflight time from any “useful” multicopter regardless of size.
- For hobby grade components, 20 minute maximum flight timeswould be a more realistic goal.
- Hobby grade motors have often used inadequate Conrad type unsealedbearings which are good axially but not in thrust.
- ESCs are also very important.
- High quality ESCs are more reliable than cheap ones.
- And ESCs need to be properly sized to ensure they can provide themaximum current that is necessary.
- Generally use the right size not over sized because they aremore efficient if operated in the appropriate range (andlighter).
- Sufficient cooling is also very important especially for “HeavyLift” copters, and the ESCs may need to be placed in the airstream.
- For small to medium QuadCopters there are four in one ESCs in the20 - 30 Amp size range with several advantages.
- They eliminate the need for a power distribution plate or blockand all the attendant wiring.
- The considerable reduction in DC wiring results in less DC EMFradiation interference with the compass.
- They can often be conveniently installed tidily in the centerof the copter frame.
- The 20 and 25 amp ones work with 3 or 4 cell LiPo batteries andthe 30 amp one works with 3 to 6 cell batteries.
- They have a built in aluminum heat sink plate on one side(which you can augment with a finned heat sink if necessary).
- You can use a thin layer of Fujik silicone thermal glue toattach a finned heat sink if one is needed.
- They generally have higher reliability than individual ESCs andare reasonably priced.
- Larger diameter slower turning propellers are normally a lot moreefficient than smaller, faster ones.
- But there are limits and drawbacks:
- Trying to turn too large a prop for a given motor can cause itto overheat so motors usually have a maximum prop size.
- Also, really large, slow props can reduce the responsiveness ofthe multicopter and even cause it to oscillate in the air orvibrate.
- Unless taken to extremes these difficulties are not usuallysignificant and can be compensated for by various means.
- And you can always drop the diameter an inch if the handlingcharacteristics or motor stress are not what you want.
- There are also different designs of propellers and for larger onesturning at slower speeds design is especially critical.
- Carbon fiber designs with cupped blades that are wider at thehub and narrower at the tip are best for larger sizes 14” andover.
- Smaller ones in the 14” and under category can be of moreconventional design with a wider than normal blade and ofplastic or CF.
- Often motors are “charted” with specific propellers and theseare certainly the best starting point for optimum performance.
- TMotor is considered a premium prop, but good results have beenobtained with RC-Timer and Tarot in the large tapered props.
- APC, DJI, GemFan, RC Drones and Graupner all produce good propsin the 14” and under category.
- But there are limits and drawbacks:
Professional Grade Power System for large Quadcopters (28” Propellers)¶
- The Tigermotor U8 Pro Seriesmotor is currently top of the line for a commerciallyavailable (large) copter motor.
- It features Environmentally protected, closed construction and
- easily replaceable bearings.
- They have very high quality two piece 27, 28 and 29” carbon fiberpropellers for them as well
- And a top quality 70 AMP ESC (speed controller) to go with it.
- U8 Pro T-Motor $300.00, 28” CF Props $370.00 a pair, 70 Amp Pro ESC$110.00 @ four each = $2380.00.
- These are used in the large Steadidrone Quadcopter shown above,clearly a top quality professional and expensive product.
- This is a very heavy lift and long endurance copter and is completelyexcessive and hazardous for most uses and needs.
- This combination will work well for a Quadcopter with a total weightof up to 24 pounds and can achieve 40 minute flight times.
- This is a copter designed for very serious uses that demand it’sheavy lift and long endurance capabilities and is not for amateurs.
- Disaster relief, search and rescue, fire spotting, surveillance,ecological and geographical survey and mapping are appropriate uses.
Professional Grade Power System for Medium Quadcopters (16” Propellers)¶
- Clearly, applying similar quality to a more reasonably sized (andcost) copter is normally going to be a lot more practical.
- A 380KV T-Motor 4008is $85.00, 16x5 CF Prop $90.00 a pair and 30 Amp Pro ESC $50.00 @four each = $720.00.
- This setup will work well for a copter up to 10 pounds or so andprovide exceptional durability, efficiency and endurance.
- This is a very practical setup for a professional Quadcopter forphoto or video use with full sized cameras and a brushless gimbal.
- It can be set up to let you choose 4S 14.8 volt, 5S 18.8 volt or6S 22.2 volt batteries and 14” to 17” props according to yourtotal weight.
- With a proper setup you could reasonably expect to achievepractical 30 minute plus flight times with full camera equipment.
- This is a very superior ($120.00) KDE 4014XF-380KV Motor with 3 largereplaceable ABEC bearings rated at about 200 hours.
- This motor is capable of using 13” to 18” propellers and operating very efficiently with a wide range of batteries from 3 cell to 6 cell.
- This KDE Motor has a phenomenal range of operation and can be used on a 7 pound to a 20 pound Quadcopter.
- Every component and manufacturing technique was clearly optimized to produce the best possible motor without compromise.
- This motor has a finned heat-sink case and a self ventilated design with high temperature encapsulated components.
- In fact it is designed to run, if necessary, continuously at temperatures that would instantly destroy most other motors.
- It is reasonable to expect that various configurations could provide well over an hour of useful operating time with cameras.
- It is feasible to produce a QuadCopter that will approach the performance of the $15,000.00 Steadidrone at a fraction of the cost.
- A similar practical lifting capability and nearly 40 minute useful flight times should be achievable even with 18” Propellers.
- And given the extreme over design and ruggedness of the motors, similar reliability and longevity could also be expected.
- This is the motor I will be using in my next Quadcopter and I will allow for up to 18” propellers.
A Hyper Efficient Medium Small Professional Grade Motor For Long Endurance¶
- The $70.00 T-Motor MN3508 380KV Navigator series motoris ideal for long flight time applications.
- This is the only motor in this size that can get G/W efficienciesover 17 at 50 percent throttle.
- If you want to build a 4-8 pound copter for maximum endurance this is the motor to use with a 4 cell LiPo.
- Because of it’s extremely high efficiency in it’s hover range it is also a candidate for high efficiency lithium batteries.
- Panasonic or LG’s high power Lithium batteries have about twice the energy density of the LiPos we normally use.
- But maximum discharge is only 2C so low current draw is required, the high efficiency of these motors can provide that.
- Carbon fiber 14” to 16” propellers will be required.
Professional Grade Power System for Small Quadcopters (10” - 14” Propellers)¶
- The largest market segment is for Quadcopters in frame sizes that use10 to 14 inch propellers and weigh 3 to 7 pounds.
- The 650 KV T-Motor MT3506at $65.00 is a high quality small but powerful pancake that can turn props from 11” to 14” diameter.
- With a 3 cell LiPo battery and T-Motor 14” prop at $73.00 a pair it can lift up to 7 pounds and achieve very good endurance.
- Add 4 T-Motor 18 Amp ESCs at $27.00 @ four each = $514.00 for top quality motors, props and ESCs.
- This small pancake motor can achieve good efficiency with 3S 11.1 volt or 4S 14.8 volt LiPo batteries and an appropriate sized prop.
- The frame should be sized to accept up to 14” propellers and various battery configurations.
- It should be configurable to achieve 20+ minute flight times with a GoPro size camera and brushless gimbal plus FPV or telemetry.
- This would still be a very capable and rugged Quadcopter capableof professional results and reliability.
- The above Motor / Propeller / ESC setups are all as close toprofessional quality as we can currently make them.
Consumer Grade Power System for Medium Quadcopters (15” - 16” Propellers)¶
- It is also possible to build a reasonably reliable and efficientQuadcopter using less expensive components.
- The $45.00 SunnySky 390KV X4112Smotor or the really low cost $18.00 RCTimer 5010-14 360KV motors.
- Which will work well with an easy to install and low EMF $40.00Hobbywing four in one ESC.
- And they both work well with RCTimer 15x5.5” (4 for $28.00) or16x5.5” (4 for $35.00) CF propellers.
- The Sunnysky Combo will cost about $260.00 and work very efficiently for copters up to about ten pounds.
- The RCTimer Combo will cost about $150.00 and will provide extended flight time for copters up to about 6 pounds.
- These motors will both actually support up to 17” propellers and work with 3 to 6 cell LiPo batteries.
- You could still design a copter that would get 30 minute flight times while carrying a GoPro and gimbal if desired.
- The frame for either of these motors should be designed to support at least 16” prop diameter and 17” would be better.
- These will not last as long nor be as reliable as the previous T-Motor configurations but will still deliver lots of solid use.
Consumer Grade Power System for Small Quadcopters (8” - 12” Propellers)¶
Mario party 8 wii iso torrent download free. Here is a durable and low cost alternative for powering smaller hobbyor even semi-pro sub 5 pound Quadcopters.
The DJI 2212 Motorsprovided with their low cost ARF Flamewheel Quadcopters are unusually durable and cost $24.00 each.
And DJI’s specially hubbed 10” plastic props at $8.00 a pair are well balanced, efficient and rugged.
And this easy to use $40.00 four in one ESC eliminates a powerdistribution board, reduces EMF and provides good reliability.
For $150.00 you can actually get quite a useful and durable powersystem for a smaller sub five pound quadcopter.
The $40.00 SunnySky X4108S pancake motor is also capable of being used on Quadcopters lifting up to 10 pounds.
- It is well regarded, efficient and durable and is suitable for use with 14” or 15” propellers and 4 cell to 6 cell LiPo batteries.
- Clearly these are not the only alternatives.
- If you want to use your copter for constant, professional use you will want something like the first 3 configurations.
- For occasional, hobby or non-critical use for flying, FPV and / or personal video or photography the others should be OK.
- The KDE and Pro T-Motors bearings will last longer and are more weather proof and reliable than the less expensive alternatives.
- And the more expensive Carbon Fiber props are more efficient, better balanced and more durable than cheaper alternatives.
- But properly installed on an appropriate copter the less expensive alternatives listed can provide many reliable hours of flying.
- I have favored slow speed pancake motors because efficiency and flight time benefit from the larger propellers they can use.
- The above illustrates just some of the possibilities in identifying an appropriate power system for your project.
The MultiCopter Frame¶
There are many types of frames and it is most important to put together a frame that is appropriate for your use.
- There are a lot of Multicopter frame types and many are available as bare frame kits or Almost Ready To Fly or Ready To Fly copters.
- Most professional grade Multicopters are made from fiberglass and carbon fiber cut tubing and plate.
- Carbon fiber is very strong, but is also brittle and canshatter on impact, it is also hard to machine and to glue to.
- Fiberglass weighs a bit more for equivalent strength but ismore shatter resistant and easier to machine and glue to.
- Fiberglass or carbon fiber tube and sheet construction are verysuitable to use for making your own copters.
- Many consumer grade Multicopters are made with injection moldedplastic parts and aluminum tubing.
- Some injection molded parts can be very durable (the Iris’sZytel frame arms for instance), but others are cheap and breakeasily.
- Square aluminum tubing frame arms are common, but they tend tobend or break with annoying frequency in normal mishaps.
- Except in specialized welded H or box frames aluminum tubingframe arms are sub optimal and will not be covered in depthhere.
- Some of the newer, smaller, commercially made Quadcopters havemonolithic injection molded plastic shells.
- On smaller copters these shells can be quite durable but theywould be too fragile on larger ones even if mold costs werejustified.
- A few Quadcopters have monolithic shells made from vacuum formedlaminated Kydex or other plastic sheet
- Vacuum formed shells of laminated Kydex have proven verydurable on small copters and are very good for waterproof uses.
- At least one vacuum formed copter has been made with built inblade guards the Safe Flight 4410 (unfortunately out ofbusiness).
- Hand laid fiberglass or carbon fiber is also popular on high endquadcopters.
- There are some very attractive, hard to get and not inexpensivehand laid fiberglass and carbon fiber shells made by “DeX”.
- There are also a variety of fiberglass shells for civilian,commercial and military use including an amphibious one.
- Fiberglass shells tend to be expensive and may get damaged inuse and can be difficult to repair.
- Each type of construction has advantages and disadvantages and itis very important to figure out what is important for your needs.
- Prop to prop and prop to frame clearance limit the max diameter ofyour propeller blades.
- Allowing for various prop diameters will let you tune thecopter for its current weight, batteries and function.
- Generally allow an additional half inch of clearance from proptip to tip or to center frame to avoid asymmetrical prop washvibration.
- A major design criteria is to size the frame appropriately forthe largest propellers you might ever want to use.
- Generally bigger propeller diameter equals better efficiencyand an X frame layout normally permits the largest possibleprops.
- Of course the motor speed and power and frame strength have tobe matched to the propeller diameter and to total liftingcapacity.
- Pancake Low KV, Low RPM motors can turn bigger propellersefficiently.
- It is possible to overlap prop tips if you have one above theother, but it does affect efficiency and induces asymmetricvibration.
- Big slow props can have adverse vibration, instability, gustcompensation and response rate issues also so that is adownside.
- The additional motors of Hex and Octocopters can permit singlemotor out recovery and provide for smoother flight for photo uses.
- But they need to use smaller propellers because of motor tomotor clearance which is less efficient resulting in shorterflight times.
- There is also additional cost and weight of the frames andextra motors and propellers.
- And, the overall increase in complexity also reducesreliability.
- High quality extended service larger pancake motors and propsare just starting to become available.
- So we are likely to see a shift to large Quadcopters fromHexacopters and Octocopters even for professional andcommercial uses.
- Most professional grade Multicopters are made from fiberglass and carbon fiber cut tubing and plate.
The Carbon Fiber or Fiberglass Tube and Plate Frame¶
The carbon fiber or fiberglass tube and plate frame is popular becauseit is strong and light and easily manufactured.
- The Tarot 650is a typical layout medium sized carbon fiber Quadcopter frame thatcan work with up to 17” propellers.
- It features folding arms and landing gear.
- It’s ability to support pancake motors and 17” props means it canprovide long flight times.
- Some people have said the quality of construction is not as goodas it could be but for $125.00 it is an amazing bargain.
- Fabrication requirements and techniques for fiberglass and carbonfiber tube and plate copters.
- On the copters shown above the method of attachment is by clampingcarbon fiber tube frame arms with aluminum brackets.
- This is because of the difficulties in attaching carbon fiberparts as well as the stress that can result from drilling thetubing.
- Fiberglass is not quite as strong or light as carbon fiber but itis more flexible and easier to join and machine.
- If what you need is available in a commercial frame kit you arenormally better off buying it as you will spend more making your own.
- It will also take a lot of time and effort to design the copter,to obtain the components and to, cut, drill, machine and fabricatethem.
- There is also a strong possibility that design and fabricationmistakes and misperceptions will require that some things getredone.
- If you have sufficient reason to make your own frame, tube and plateconstruction is generally the most practical for home production.
- It is reasonable to mix materials, commonly carbon fiber frame tubesand fiberglass central and motor mounting plates.
- Carbon fiber and fiberglass tubing and plate can be cut with ahacksaw or power jig or band saw (with metal or fiberglassblades).
- It can also be drilled and milled with HSS or TC coated drillsand mills, but all tooling wears out very quickly cutting thesematerials.
- Carbon fiber in particular is tricky to cut, drill and machine, itcan tear, shatter or de-laminate if not done smoothly and slowly.
- A drill press is mandatory for carbon fiber, you cant centerpunch a pilot drill hole, so it needs to be held precisely inplace.
- Avoid milling of carbon fiber if at all possible, it is verydifficult to accomplish satisfactory results.
- You will see carbon fiber plates that have milled slots onconsumer copters but these have generally been cut with a waterjet.
- With carbon fiber you will generally get better resultsdrilling precision placed holes rather than attempting to millslots in it.
- You can carefully and slowly cut a carbon fiber plates exterioredges with a power saw and smooth them with a Dremel tool.
- If you must put in slots consider drilling a hole at each endand using a small circular saw on a Dremel or flex shaft toconnect them.
- Carbon fiber and fiberglass tubing and plate can be cut with ahacksaw or power jig or band saw (with metal or fiberglassblades).
- It will be necessary to provide appropriate brackets to clampthe motor mounts and central hub to the frame arm tubes.
- Tubing needs to be clamped but must not be “crushed”, silicone orrubber gasket can provide protection and vibration isolation.
- Hardware should be aluminum or stainless steel machine screws andyou can use Nylok nuts or “Blue” Loctite on regular nuts.
- Plate separation and mounting can be provided with Nylon oraluminum standoffs.
- (Note: It would be really nice if somebody made an X internalslip-glue fit ferrule for the center of the frame tubes but theydon’t - yet!)
- There are a wide variety of Carbon fiber and epoxy fiberglasscomponents to choose from.
- Carbon fiber products are available from RockWest Composites and Carbon Fiber Tube Shopand Dragon Plate
- A really good article on cutting and gluing carbon fiber productsfrom Carbon Fiber Tube Shop
- Fiberglass and Carbon Fiber products are available from: CST Sales and ACP Sales
- A datasheet for 3M 2216 Epoxy Glueand a source for itAmazon
- A datasheet for Loctite 9430 Glue and a source for Loctite9340 Amazon
Using manufactured Plastic and Fiberglass Components in Your Own Frames.¶
- Although often not reasonable to make yourself some parts can be usedeffectively in your own designs.
- There are retrofit kits like the Team Blacksheep FPV subframe for aDJI Flamewheel quadcopter that reuse it’s plastic frame arms.
- And there are many cases where components from various frames can beused to good effect in our own designs.
- Clearly it is necessary to research your individual design to assurethat the component pieces are actually available from thedistributors.
- Research can provide an excellent source of very desirablecomponents:
- Or the $14.00 CNC milled ultra tough fiberglass frame arms used in theHoverthings Quadcopters:
- DJI injection molded frame arms from their Flamewheel copters areused in the TBS Discovery FPV frame.
- Clearly using manufactured parts will require research as tosuitability and size for your project as well as actual availability.
- But if you can accommodate them they can make your projectsimpler and better.
Homemade waterproof frame using a hinged electrical box¶
An absolutely excellent, very clean, rugged and waterproof design usingcarbon fiber arms and plastic electrical and plumbing parts.
- Here is a link to Alec Short’s construction article in Makezine
- I really like the use of the central 4 way hub for stabilizing thetubes and the slip fit adjustable tension T’s for motor mounts arealso great.
- The mounting of n Pixhawk or APM2.x would really require the separateGPS / compass module in order to work correctly.
- There are a wide variety of latch type weatherproof electrical boxeswhich could be used for this.
- The main requirement is to get CF tube with an outer diameterappropriate to the plumbing / electrical fittings you want to use.
- I’ll definitely be visiting the electrical and plumbing section thenext time I’m in Home Depot.
Vacuum Formed Frames and Components.¶
- Although this is specialized and requires a vacuum forming “press” itmay be justified for some applications.
- A vacuum molding press can be made relatively inexpensively thatcan make whole small shell type frames or for components.
- Copters made this way can be made weather tight and even waterproof and they can be incredibly tough.
- Kydex is a laminated plastic sheet that produces a quite strongmonocoque shell when molded properly.
- The no longer in production Safe Flight Copters SFC4410-1 vacuumformed propeller protected H Quad Frame.
- And the inexpensive ($120.00) and extra tough, water proofAquacopter frame
- A fully functional vacuum forming system can actually be constructedwith a shop vacuum and an electric grill.
- Vacuum forming can also be used to make central shells for copterswith tube, plastic or fiber glass frame arms.
- This may be over specialized for most uses, but if you want to maketough, light central frame shells or covers.
- Or, if you want to build multiple small to medium Quadcopters thatare tough and waterproof this could be just the ticket.
- (Or you could just buy an Aquacopter frame!!!)
Specific Building Examples and Techinques¶
- Some design considerations for a medium large, high efficiency, heavylift Quadcopter build.
- A simple, rugged and very versatile X Quadcopter with a framesized large enough to accept 18” diameter propellers mightinclude:
- High quality 20mm carbon fiber tube frame arms with SteadiDronemotor mounts and central frame tube clamps from EBay or China.
- Cut and drilled carbon fiber or fiberglass top and bottom centralframe plates mounted to the tube clamps and standoffs.
- A custom or commercial off the shelf landing gear system.
- An optimal Pro configuration might include the top rated$120.00 KDE 4014XF-380KF motors and a 30 amp 3 - 6 cell four inone ESC.
- The motors and ESC would cost about $540.00 and you would get acopter tuneable to lift up to 20+ pounds in total weight.
- It is reasonable to get this configuration to achieve usable 60minute flight times even with photo or video equipment aboard.
- A more conservative hobby configuration might include the $40.00SunnySky X4108S 380KV motors and a 25 amp four in one ESC.
- The motors and ESC would cost about $200.00 and you would get acopter tuneable to lift up to 10+ pounds in total weight.
- Even with this setup you could achieve usable flight times inexcess of 30 minutes with small to medium consumer sizecameras.
- Some additional features that need to be considered are:
- A third frame plate under the two frame tube sandwiching platescan accommodate the batteries, ESCs and Receiver.
- A vacuum formed, fabricated or adapted top and bottom shell canweatherproof the copter and increase its resistance to mishaps.
- This frame is less than 27” from corner to corner, but props canbe removed for transport or folding arms could be incorporated.
- This frame will be very light and strong and it will allow lots oflatitude in how it is set up and it will be easy to upgrade.
- It’s ability to accept larger props even with an inexpensive powersystem will provide much better than average flight times.
- The copters capabilities will be according to the power systemselected, the battery combination used and the total weight.
- You can include a camera gimbal under the center plate, make surethe landing gear does not interfere with the cameras view.
- The landing gear should minimize interference with prop wash andprovide strong, resilient and stable support.
- If you really are determined to build your own frame, this is areally good place to start.
- The above design is a very capable pro-grade Quadcopter with anexceptionally wide performance and endurance envelope.
A Small Quadcopter Optimised to Use High Efficiency Lithium Batteries¶
- Modern ultra efficient Lithium batteries can have nearly twice theenergy per unit weight of the LiPo batteries we normally use.
- 3300 mah 3.7volt Panasonic NCR18650B batteries weigh 47 grams versusa normal LiPo equivalent of about 100 grams per cell.
- Their disadvantage is that their maximum discharge rate is only 2C so6.6 Amps.
- They will also last for many times the number of charge dischargecycles of our normal LiPos.
- Used properly a copter using these batteries can get nearly twice theflight time of one with the same weight of LiPo batteries.
- The most important factor in designing a copter to use thesebatteries is to keep the weight low enough that their is sufficientcurrent.
- This quadcopter design uses carefully selected T-Motor MT2206 1200 KV30 gram motors and 10” props with a light carbon fiber frame.
- It includes a 2S 2P 6600mah lithium battery, autopilot,receiver and even an FPV camera and transmitter.
- It weighs about a pound and since the battery is 2 parallel it canprovide 13.2 amps of current (max current is less than 10 amps.)
- Xcalc computationsshow that a hover time of 60 minutes might be possible with arealistic fly around time of about 30 minutes.
This is an easy to build example of a practical and rugged design withexceptional capabilities and double the normal flight time.
Links To Specific MultiCopter Builds¶
- Here is a link to Forrest Franz’s build of a very simple, very lightweight, very strong carbon fiber Quadcopter frame
And some links to some of Forrests extremely ambitious copterbuilding techniques and concepts.
And here is a link to Luke Cook’s very serious, very well thought outand meticulously executed OctoCopter Build
A link to Stuart Dodin’s really nice X8 heavy lifter Octocopter
A Commercial MultiCopter Exhibiting Advanced Design Concepts¶
Here is an example of an excellent QuadCopter design: the AeryonSkyRanger for high end UAV applications.
This copter has a lot of things right and is really a study in gooddesign and quality construction.
- The rotating ball full enclosure camera Gimbal provides good weatherprotection and improved performance.
- The motors are on the bottom under the arms.
- More aerodynamically efficient with no prop wash interference andvery little intake interference.
- Noticeably increased flight times, greater lift capability andquieter as well.
- High torque, low KV “pancake” style motors and slow turning, largediameter, high efficiency props.
- This is much more efficient than faster motors with smallerdiameter conventional design props.
- This also increases flight times and load capacity and reduces thesound footprint.
- Tapered carbon fiber frame arms are more aerodynamically efficientand are light and very strong.
- The fully enclosed weather tight framework with snap latch typeaccess makes maintaining the copter easy.
- A simple spring loaded landing gear provides for uneven landing sitesand minimal interference with the prop wash.
This QuadCopter incorporates several excellent design concepts and showswhat can be done without budget constraints.
The Skyranger has features we can use in our own designs but it isimportant to understand all designs are compromises.
The 3DRobotics Iris is one of the best designed QuadCopters that you canactually get and it is a real bargain.
Conclusion and Additional Design Considerations¶
- I have not covered either 3D printing or CNC machining.
- These are both perfectly valid techniques for either whole framesor for parts or accessories.
- But most people do not have the equipment or capability which iswhy they are not covered here.
- Clearly if you have either of these capabilities they can greatlyenhance your copter projects.
- I have also not covered in depth hand laid fiberglass or carbon fiberor vacuum bagging.
- You can make Dynamite frames or shells this way but this toorequires serious individual skill and capability (especiallycarbon fiber).
- I have also not gone into detail about the engineering criteria formulticopters:
- I don’t know.
- From what I’ve seen very few people do.
- C. One who does is Paul Pounds PHD and here is his Paper on thesubject: Quadrotors
- If you stick to a simple design and try to keep frame arm to a simplesingle small tube under the prop wash it will work fine.
- Round tubing has about half the flat plate area (prop washinterference) as the same sized square tubing.
- You can improve efficiency by putting the motor prop under theframe arm but then there are frame design and clearance issues.
- Try to keep the weight centralized as much as possible and keep theautopilot near the horizontal center if possible.
- So that the copter tends to roll and pitch as though pivotingaround the center of mass and around the autopilot.
- However it is not as critical as some people have made it out tobe because the stabilizing throttles will automaticallycompensate.
- You can do a lot with a rudimentary understanding of the forcesinvolved, if you need more it is a career, not a hobby.
KV (rpm/v): 380
Weight: 113g
Diameter: 46mm
Length: 25.5mm (excluding motor shaft)
Wire length: 60cm
Prop adaptor output shaft diameter: 6mm
Application: specially designed for quadcopter and multi-rotor aircrafts.
Prop size (inch) | Throttle | Pull(g) | Power(W) | Temperature under 100% throttle for 10 minutes(℃) |
APC14*4.7 | 50% | 340 | 19.24 | 50 |
2.9 | 3163 | 12.81454 | ||
5 | 3747 | 10.54054 | ||
6.7 | 4070 | 9.479629 | ||
8.7 | 4385 | 8.62069 | ||
50% | 340 | 19.24 | 56 | |
2.7 | 3245 | 13.76376 | ||
4.5 | 3872 | 11.56156 | ||
6.2 | 4250 | 10.46207 | ||
7.6 | 4587 | 9.868421 | ||
18.5 | 2.1 | 3076 | 13.64221 | |
65% | 760 | 68.45 | ||
75% | 1140 | 135.05 | ||
85% | 1320 | 170.2 | ||
100% | 1580 | 227.55 | ||
DJI15x5 | 1.8 | 3038 | 15.31532 | |
65% | 710 | 57.35 | ||
75% | 1020 | 103.6 | ||
85% | 1280 | 151.7 | ||
100% | 1560 | 194.25 | ||
APC12*3.8 | 50% | 480 | 37.74 | 60 |
3.6 | 4675 | 9.634635 | ||
6.4 | 5487 | 7.882883 | ||
9.2 | 6000 | 6.903643 | ||
11.8 | 6387 | 6.18415 | ||
50% | 380 | 31.08 | 49 | |
2.4 | 4903 | 10.88589 | ||
4.5 | 6070 | 9.109109 | ||
5.7 | 6583 | 8.613877 | ||
7.5 | 7210 | 7.927928 | ||
50% | 730 | 68.82 | 94 (Do not suggest run for long time.) | |
5.5 | 4281 | 8.681409 | ||
9.2 | 4950 | 6.952605 | ||
12.2 | 5269 | 6.166002 | ||
15.5 | 5610 | 5.492589 | ||
50% | 700 | 55.5 | 63 | |
4.2 | 4276 | 10.51051 | ||
7.2 | 5085 | 8.633634 | ||
10.3 | 5610 | 7.30342 | ||
13.7 | 6115 | 6.575919 |